Pick & Place Machine
Design and simulation of a pick and place machine for automated component handling.
In this project, we were tasked with designing a pick and place machine for automated component handling.
A CoreXY belt-driven mechanism was selected here to minimise moving mass and improve dynamic performance. This resulted in smooth, consistent motion and avoided common issues such as vibration and belt slipping that affected other designs.
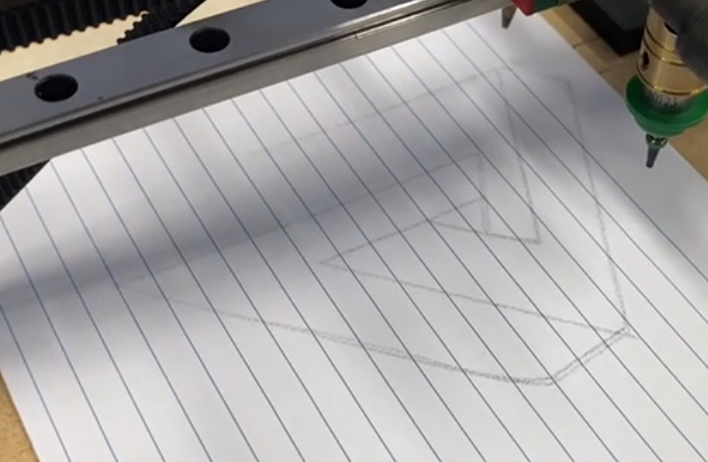
Due to the lack of available vacuum pump components, I adapted the system to demonstrate performance by drawing an optical illusion on paper, as shown above.
The machine was programmed using G-code to execute the drawing, demonstrating accurate positioning and repeatable motion.